ロボットの定義をfig.1に示す.ロボットは手足は2つの,胴と頭は1つの直方体で構成する.
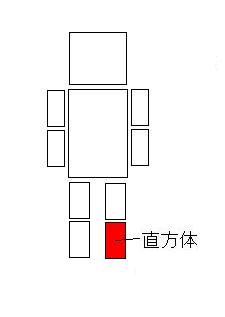
fig.1 ロボットの定義
プログラムは以下の3つの状態として考える.
1.ドリブルしてる状態
2.ボールを蹴る状態
3.ボールを蹴った後の状態
各状態で行う処理は以下の通りである.
1.ドリブルしてる状態
・手足を動かす.(回転)
・ロボット全体を動かす.(平行移動)
2.ボールを蹴る状態
・右足以外の手足の角度を固定.
・右足の角度を更新.(回転)
3.ボールを蹴った後の状態
・手足の角度を固定
・ボールの移動(平行移動)
手足を動かす処理はfig.2に示すようにr1とr2を動きにあわせて変更する.
ロボット全体を動かす処理は構成する直方体を平行移動させる.
ボールを動かす処理も同様に平行移動させる.
fig.2 回転に関する処理